Note
Go to the end to download the full example code.
Plot front position for each method.
This section shows how to use show_fronts_over_methods function to plot front position for each methods.
For each case, we will use an initial water depth \(h_0 = 20m\). For Mangeney’s method, we use a slope of \(\theta = 30°\) and a friction angle of \(\delta = 25°\). For Stoker’s method, we use a domain depth of \(h_r = 1m\):
Implementation
from tilupy.analytic_sol import Front_result
A = Front_result(h0=20)
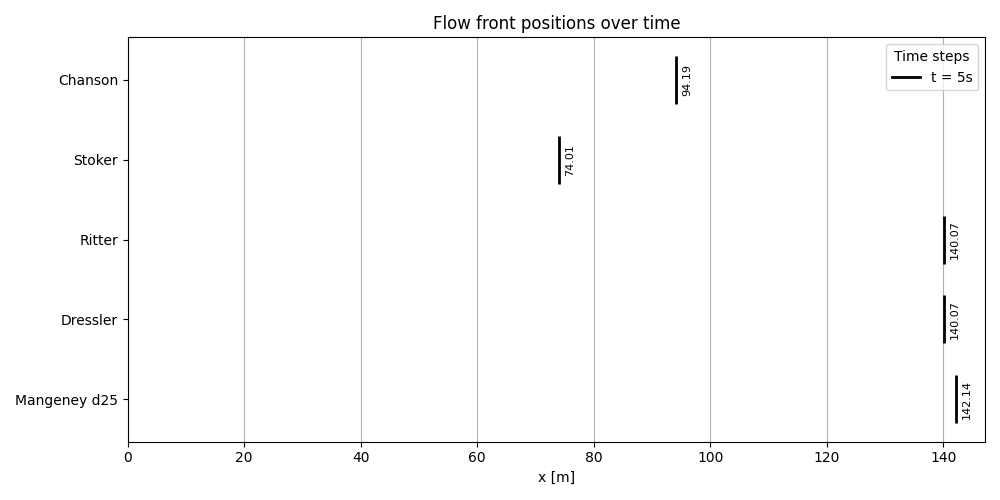
Case 1: computing only for \(t = 5s\).
t = 5
A.xf_mangeney(t, delta=25, theta=30)
A.xf_dressler(t)
A.xf_ritter(t)
A.xf_stoker(t, hr=1)
A.xf_chanson(t, f=0.05)
A.show_fronts_over_methods()
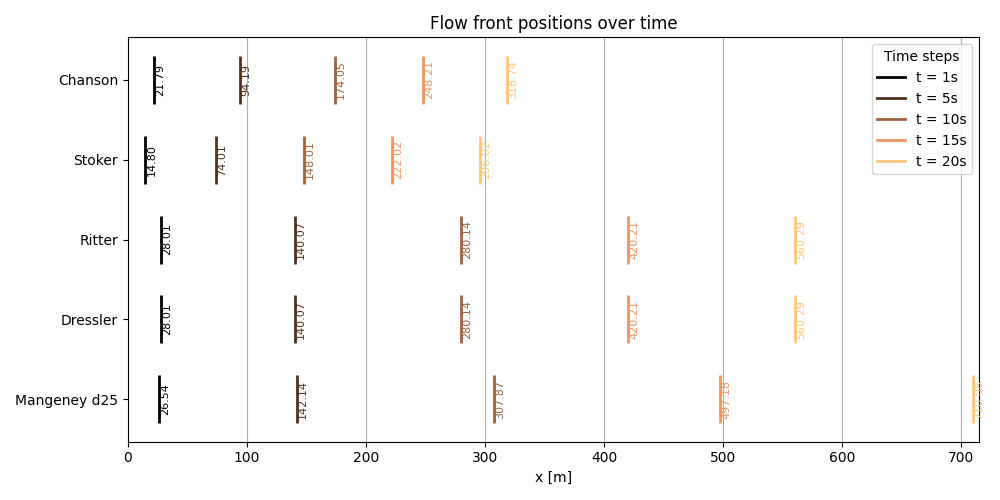
Case 2: computing for \(t = {1, 5, 10, 15, 20}s\).
T = [1, 10, 15, 20] # t = 5 already compute
for t in T:
A.xf_mangeney(t, delta=25, theta=30)
A.xf_dressler(t)
A.xf_ritter(t)
A.xf_stoker(t, hr=1)
A.xf_chanson(t, f=0.05)
A.show_fronts_over_methods()
Total running time of the script: (0 minutes 0.190 seconds)